
You must log in or register to comment.
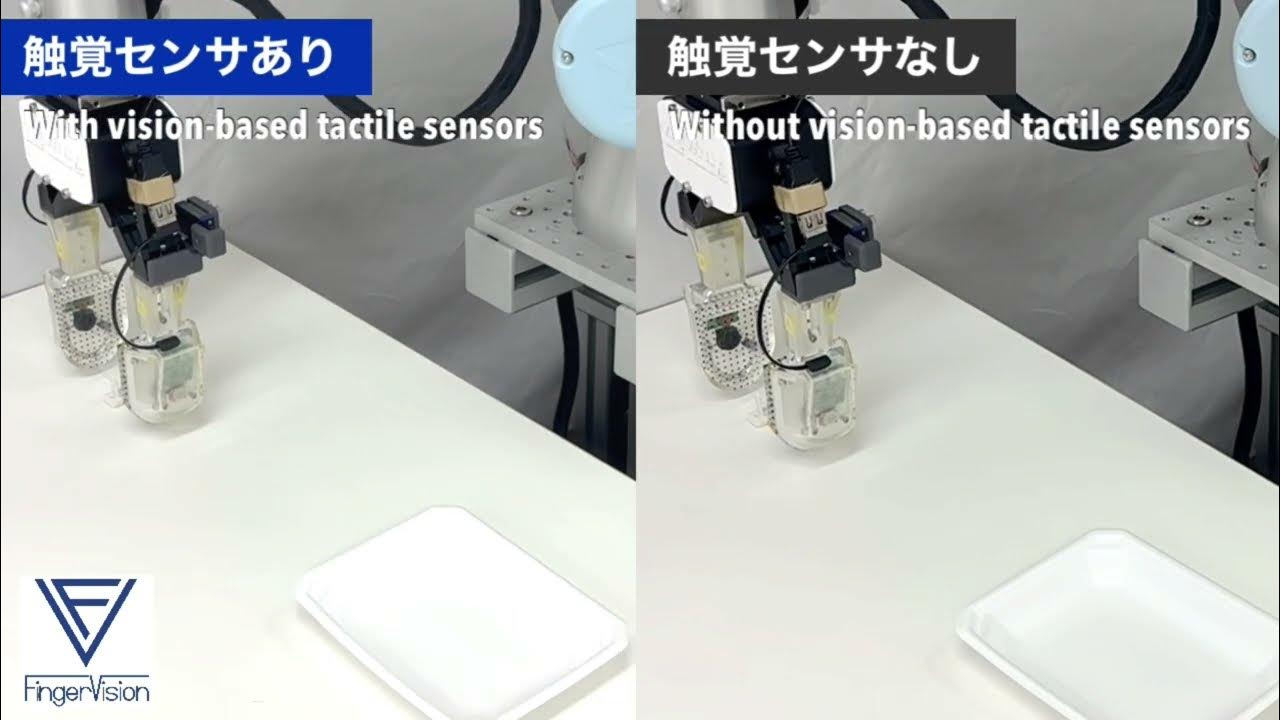
This looks more like they intentionally didn’t make the gripper on the right close with proper force, especially on the hard products. For soft products a pneumatic/vacuum based tool is normally used instead. Very few robot applications have to pick a wide variety of product types dynamically in a way that makes switching toolheads impossible/too impractical.
The crane game on the left has been rigged to pay out every time
