
{kind=link}
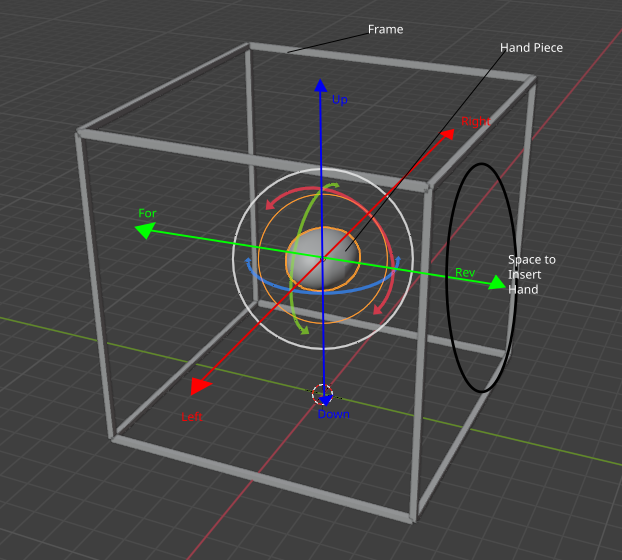
I have been thinking of a controller like this, which would be pretty fun to use for space games.
The ellipsoid marked as “Hand Piece”, is supposed to be braced to the frame with motion encoders and need to push back the Hand Piece to the 0 position in case the user stops adding force in any direction.
Additionally, the hand piece can also have 5 buttons, 2 placed for the thumb and 3 placed for the 3 longer fingers each, with the button for the middle finger being a scroll wheel.
This should make up for actions like, Primary and Secondary fire, Target lock and cruise control adjustment, hence freeing the second hand for controlling utilities on the keyboard, or eating snacks. Whichever you prefer.
Been on the market for many years.
https://3dconnexion.com/us/product/spacemouse-wireless/
https://mattjones.tech/using-3dconnexion-spacemouse-with-linux/
I might be missing something, but it seems to have only one rotational axis.
If that is the case, then a Joystick as a part of a HOTAS would be much superior.
Using modifiers for axis changing makes sense when using CAD software, but not much when doing space combat. My aim is Elite: Dangerous.
I’ve used them, they have all 6DoF. No modifiers. The fancy ones have macro buttons too. https://www.youtube.com/watch?v=ZqTRJ7oTKII&t=0
Now the more I look at it, the more I want to make the device in the post.
Any idea as to where I might be able to get such a sensor which I may be able to use as a component?
It would be nice to be able to make a mouse with some buttons around it, as opposed to buttons on the side, as is in the 3DConnexion.
I have experience using the ThinkPad’s nipple and this is like that thingy, with 4 more DoF.
No offense but your post is kinda half baked. It’s not really clear what you are imagining this to be. Position sensing is a wide field. It really depends on the rest of the design. You could use rotary or linear encoders. I saw some diy video that used a magnetometer…
Personally if I wanted to reinvent the wheel for a space flight sim type controller is do something like mount a joystick to what would essentially be a delta robot are with series elastic actuators. Alternatively mount an interface on a Stewart platform, again using series elastic actuators. This approach would be fun but real use you would run into the gorilla arm syndrome problem.
/$0.02
Your reply is helping me shape my ideas better.
If I were to use other objects as reference, it would be a 3DConnexion Space Mouse, shaped more like a handle to be held horizontally, and having extra buttons and a scroll wheel, right on the handle instead of around it.
The reason I went into making a frame was because I doubted being able to make something having a low movement actuator with those many axes and yes, I started looking into having linear actuators for the thrust controls. But if there is already a product as the Space mouse, then most of the engineering has already been done and all we need to do is, change the packaging parameters a bit, provided the 6 DoF actuator is available as a component. Also, the user won’t have as much arm fatigue in this case.
Oh! It’s one of those low-movement force actuated thingies!
As a HiDPI user, this seems to fit very well to my needs and would be much better than having stuff travel for a few centimeters to register thrust.
Since you have used it, could you tell me the lifetime of these things? Can I expect them to keep working for at least a decade as long as I don’t abuse them?